I'm completely new to parallella board and I just got one early version of A101040, want to try SLAM problem also. If you have a bit more info. to share, that'll be great. Thanks.
Statistics: Posted by jincheng.li — Sun May 07, 2017 5:53 am
]]>
Ok had a quick read here and it all seems overly long-winded and overly complicated ?
I am lucky enough to have qualified for a student license of Inventor and I can grab Electrical if I really need it, so is it not possible to just import period, equally per this I found on RS components and it has free software if its useful, do RS have a model already prepped perhaps as I bought my first board from them, might it be an Idea as there your a UK reseller?
...
To be frank its it about doing some concept design to create a "Noggin" cluster, for a bipedal robot based on i-Cub
or drawn from, so pos some streamlined liquid cooling, in combo with a peltier TEG/s, is anyone designing any daughter boards/shields as they say in Ardunio land at all? A diddy Optical/fibre adapter & micro hub would be great as CAT6 is a bulky as heck, then Gig/Fast wireless/radio back to norm Cat6 gig network. All diddy and a cheap as chips obviously.
Then the "Noggin" cluster can un-docked from Bot and continue to exist in a Sim/Virtual space "Noggin-Dreams", this looks pretty cool but integration into a better CGI Engine would be good like Unreal or Unity3D. The other element would be to make the "Noggin-Dreams" accessible in the Cloud, like its own open source Game, but is kinda working like Boinc, actually a bit of that and a bit of in effect like an on-line game-sim world for Machine Learning Cognitive Characters, that is its own parallel cognitive learning network. Mods inside the Virtual world being as functional in the Real-world if one could only afford it.
Just wondering if there is anywhere else I can post this as there does not see to be an Open forum for I-Cub, or is anyone could help me but everything together pitch it as a Open source project & have a Team to work with. Can see immediate applications for kids, especially those with Aspergers/Austin interacting with a cognitive childlike character/s within a Sandbox like world, in fact many other such a Trauma therapy, when you then combine it with Real-life & say Hologlass/Augmented Reality & EEG tech etc, etc. Let alone the bigger research gains.
Thing is I have always been a very visual BIG Ideas person, but really need the help of a team having Aspergers myself. Can you say repost or should I repost as a project idea and obviously any recommends on other forums would be peachy. In the meantime I will start working on some concept art and infograms (hence ideally needing models of everything, so can base characters in VR (Blender/Maya + Game engine once out of Inventor) around skinning I-cub in 1st instance, with parrallel mod). Just wish I-cub was a bit more Open as its Sim is just far too stand-alone at the moment as main biggest gains in feild as far as I can see at mo. I even started to setup Azure APIs/tools for Storm & Spark via the Hortonworks Virtual Machine Sandbox, but the free Student account does bugger all so much for actually learning anything, as obviously the idea needs a cloud as well a local cluster/s, so any other ideas to be able to access anything so I can learn?
Must admit Poppy looks interesting, going to see if they can help too.
As well as a fair bit of fiddling while I await some more bits to get my 1st board up to do some testing on that too. Yey for Noggin Juice, just seen it whirring away he..he...!!!
Cheers
Karma
Statistics: Posted by Karma — Sat May 16, 2015 3:45 am
]]>
Any plans to move some of the number crunching from the i7 to Epiphany? What kind of software would you need in place to make that happen? I want to help anyway I can.
Thank you!
Andreas
Statistics: Posted by aolofsson — Tue Feb 10, 2015 6:45 pm
]]>
Brennand Pierce
Some images of the progress:
The robot
Statistics: Posted by Bren — Tue Feb 10, 2015 12:24 pm
]]>
Regards,
Andrew
Statistics: Posted by 9600 — Sat Nov 22, 2014 2:08 pm
]]>
]]>
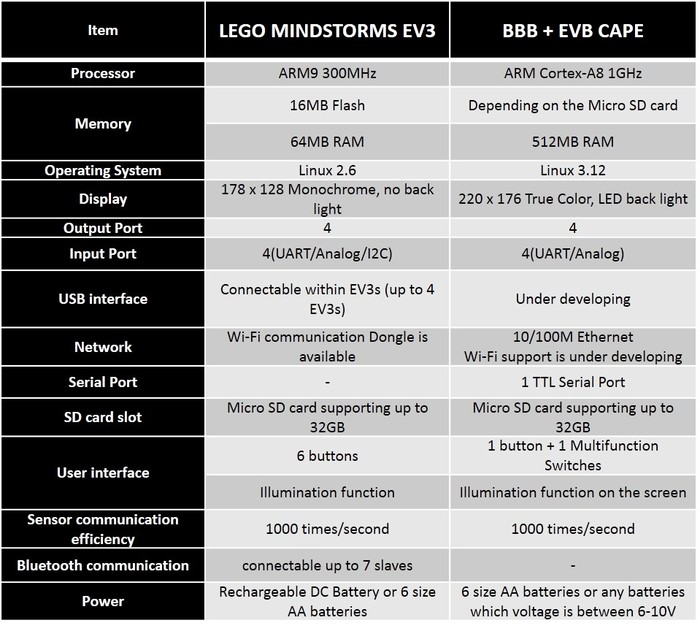
It's great to know you. I am a huge fan of LEGO and wanted to pass on something new that could be a nice fit for you. One of my friends invented EVB and it is really powerful.
EVB is a shield (or called cape) for Beaglebone Black (BBB). The power inside is EVB fully support LEGO? MINDSTORMS? EV3 system, no matter the hardware and software! It is cheaper! EVB is compatible with all LEGO sensors just like EV3 Brick, 100% same! It allows the EV3 VM to be run on the Beaglebone Black. What powerful is, with extra Sensor Board in EVB system, you can do more! This means you can add more sensors to your LEGO system.
If you want to know more, please visit his webpage at www.fatcatlab.com
Video: https://vimeo.com/111192837
Statistics: Posted by Roboter — Mon Nov 17, 2014 3:11 am
]]>
I intend to use a parallella mini cluster to perform simultaneous localization and mapping for a self driving car I am building for a competition in India (). Has anybody here worked on SLAM algorithms on the epiphany so far?
Thanks,
Rohan
Statistics: Posted by rsundar1987 — Wed Nov 12, 2014 12:14 pm
]]>
I also meant to show an autogenerated panorama which was the output of one of the test runs. Will add that in the coming days.
Statistics: Posted by yanidubin — Mon Oct 27, 2014 12:23 pm
]]>
Next step will be integrating this with the Parallella, and posting a video of the beast in action. Watch this space
Statistics: Posted by yanidubin — Sun Oct 26, 2014 6:30 am
]]>
To build the eSDK I cross compiled the entire SDK on my Linux PC. Following the steps from the Github wiki () I was able to generate most of the necessary files. Though initially I noticed that if the download-toolchain.sh script is run without parameters it pulls out-dated sources, so I used the "./download-toolchain.sh --clone" command instead to have it get the most up-to-date sources.
With all the most recent updates from the repositories and calling the build-epiphany-sdk.sh script the resulting esdk folder had only two folders inside the esdk folder, tools and bsps. Looking through the build-epiphany-sdk.sh script all of the files that were not there came from the install-sdk.sh script and epiphany-libs/build-libs.sh (I needed to manually download the Epiphany-Libs 2014.08.rc repo "git clone https://github.com/adapteva/epiphany-libs.git" inside of the sdk folder). To correct these issues I had to manually download the kernel source repository "git clone https://github.com/parallella/parallella-linux.git -b main" and export its location "export PARALLELLA_BUILD_HOME=PATH_TO_THE_DIRECTOR", this is required for the e-lib.h to build successfully.
Once all of that was done I called the install-sdk.sh script (./install-sdk.sh -n "2014.08" -x "master" --host arm-linux-gnueabihf -p /opt/adapteva) and the eSDK compiled successfully. To verify that everything was in place I checked the "/opt/adapteva/esdk/" and found that all missing files were in place, and that e-lib.h was in "/opt/adapteva/esdk/tools/e-gnu/epiphany-elf/include" which it was not before. Next I used scp to transfer the files to the Parallella (as stated in the Github wiki). Finally, to confirm that the eSDK was usable I ran some epiphany-examples on the Parallella and had no issues.
The next step from this point is to test the system with ROS and see if I can have a ROS node utilize the Epiphany before going into modifying ROS to operate entirely on the Epiphany.
--John
http://www.chicagoedt.org/
Statistics: Posted by Gamedrummer — Sat Oct 18, 2014 6:56 am
]]>
All the various bits and pieces I have already tinkered with and prototyped over the years. This is about bringing them together under one brain (the Parallella), getting a working prototype, then iteratively improving the design moving forwards.
Topics covered will include:
Camera control (PTP via USB) for exposure setup and triggering
Camera positional control (motors, mechanical rig, PID control of both movement and balancing using accelerometers)
UI (Android, controlling robotics via BT, using built-in gyro/accelerometer)
Daughterboards (AVR which will drive the motors will be connected via the Porcupine)
FPGA customisation (bringing out the UART to the GPIO_PEC interface)
Extended topics will likely include:
Image processing/compositing on the Parallella
If anyone is interested in discussing this/related ideas, please fire away.
Statistics: Posted by yanidubin — Tue Sep 30, 2014 10:25 am
]]>
]]>
]]>
]]>